|
มอเตอร์อะซิงโครนัส
หรือที่เรียกว่ามอเตอร์ชนิดเหนี่ยวนำ (Induction Motor) ซึ่งจะมีขนาดตั้งแต่เล็กๆ ไปจนถึงขนาดหลายร้อยแรงม้า มอเตอร์ชนิดเหนี่ยวนำมีทั้งที่เป็นมอเตอร์ชนิด
1 เฟส (Single Phase) และชนิดที่เป็นมอเตอร์ 3 เฟส (Three
Phase) มอเตอร์เหนี่ยวนำเป็นมอเตอร์ไฟฟ้ากระแสสลับที่มีคุณสมบัติที่ดี
คือ มีความเร็วรอบ คงที่ เนื่องจากความเร็วรอบของมอเตอร์เหนี่ยวนำขึ้นอยู่กับความถี่
(Frequency) ของแหล่งกำเนิดไฟฟ้ากระแสสลับ มีราคาถูก โครงสร้างไม่ซับซ้อน
สะดวกในการบำรุงรักษา เพราะไม่มีแปรงถ่าน และ คอมมิวเตเตอร์เหมือนมอเตอร์ไฟฟ้ากระแสตรง
เมื่อใช้ร่วมกับเครื่องควบคุมความเร็วแบบอินเวอร์เตอร์ (Inverter) สามารถควบคุมความเร็ว (Speed) ได้ตั้งแต่ศูนย์จนถึงความเร็วตามพิกัดของมอเตอร์
นิยมใช้ เป็นต้นกาลังในโรงงานอุตสาหกรรม เพื่อขับเคลื่อนลิฟท์ ขับเคลื่อนสายพานลำเลียง
ขับเคลื่อนเครื่องจักร ไฟฟ้า เช่น เครื่องไส เครื่องกลึง เป็นต้น มอเตอร์เหนี่ยวนำมี
2 แบบ แบ่งตามลักษณะของตัวหมุน คือมอเตอร์เหนี่ยวนำที่มีโรเตอร์แบบกรงกระรอก
(Squirrel Cage Induction Motor) และมอเตอร์เหนี่ยวนำที่มีโรเตอร์แบบขดลวด
(Wound Rotor Induction Motor) -
โครงมอเตอร์ (Frame)
ทำจากเหล็กหล่อเหนียว หรือเหล็กเหนียวเป็นรูปทรงกระบอกกลวงมีฐานเป็นขาตั้ง
ด้านข้างตัวมอเตอร์จะมีกล่องสำหรับต่อสายไฟ (Terminal Box) โครงทำหน้าที่จับยึดแกนเหล็กที่พันขดลวดให้แน่นอยู่กับที่
และรองรับน้ำหนักทั้งหมดของมอเตอร์ที่ผิวด้านนอกของโครงจะออกแบบให้มีครีบ เพื่อช่วยในการระบายความร้อนของมอเตอร์ รูปโครงมอเตอร์เหนี่ยวนำ 3 เฟส -
แกนเหล็กสเตเตอร์ (Stator
core) ทำมาจากแผ่นเหล็กบางๆ อัดซ้อนกันและยึดติดเข้ากับโครงของมอเตอร์ มีลักษณะเป็นรูปทรงกระบอก และด้านในทำเป็นสลอต
ไว้สำหรับพันขดลวด นอกจากนี้แกนเหล็กยังทำหน้าที่เป็นทางเดินของวงจรแม่เหล็ก
รูปแกนเหล็กสเตเตอร์และขดลวดสเตเตอร์ของมอเตอร์เหนี่ยวนำ
3
เฟส -
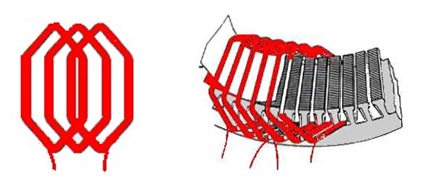
ขดลวดสเตเตอร์ (Stator
Winding) ซึ่งเป็นขดลวดทองแดงที่พันอยู่ในสลอตของแกนเหล็กสเตเตอร์
และเป็นลวดทองแดงที่เคลือบด้วยฉนวนไฟฟ้าอย่างดี เมื่อพันเสร็จแล้วจะอาบด้วยน้ำมันวานิชและอบให้แห้งอีกครั้งหนึ่ง มอเตอร์เหนี่ยวนำ 3
เฟส ที่สเตเตอร์มีขดลวดพันอยู่ 3 ชุด หรือ 3
เฟส ซึ่งแต่ละเฟสจะทำมุมห่างกัน 120 องศาไฟฟ้า
และขดลวดแต่ละเฟสจะต่ออนุกรมกันเหมือนกับขดลวดอาร์เมเจอร์ของเครื่องกำเนิดไฟฟ้ากระแสสลับ
แต่ละเฟสมีกลุ่มของขดลวดอีก เช่น มอเตอร์ที่มี 36 สลอต (Slot)
4 ขั้วแม่เหล็ก (Pole) 3 เฟส (Phase) จำนวนสลอตต่อขั้ว (Slot/Pole)
จะมีค่าเท่ากับ 9 สลอต
ดังนั้นจำนวนกลุ่มของขดลวดในหนึ่งขั้วแม่เหล็กต้องเท่ากับ 9 ขด
และแบ่งจำนวนกลุ่มของขดลวดต่อหนึ่งเฟสจะมีค่าเป็น 3 ขด
ในการพันขดลวดทั้งสามขดของแต่ละเฟสนี้จะพันลงสลอตเรียงกันไป 3 สลอต และการพันขดลวดทั้ง 9 ขดในหนึ่งขั้วจะพันเรียงกันไป
9 สลอต
ก.กลุ่มของขดลวดต่อเฟส ข.กลุ่มของขดลวด 3 เฟสต่อหนึ่งขั้ว รูปการพันขดลวดมอเตอร์เหนี่ยวนำ 3 เฟสแบบแลป (Lap Winding) เมื่อพันขดลวดจนครบทั้ง
36
ขดแล้ว จะสังเกตเห็นว่าในหนึ่งสลอตจะมีขดลวด 2
ขด ซึ่งเป็นด้านของขดลวดที่ต่างกัน เรียกว่า การพันขดลวดแบบสองชั้น (Two
Layer) เป็นที่นิยมพันกันโดยทั่วไป เนื่องจากลักษณะการพันขดลวดสเตเตอร์ของมอเตอร์จะเหมือนกับขดลวดอาร์เมเจอร์ในเครื่องกำเนิดไฟฟ้ากระแสสลับ
ซึ่งระยะพิตช์ (Pitch) ของขดลวดสามารถแบ่งออกได้เป็น
2 แบบ ได้แก่ ขดลวดที่มีระยะพิตช์เต็ม (Full Pitch) และระยะพิตช์เศษส่วน (Fractional Pitch or Short Pitch) การพันขดลวดของมอเตอร์เหนี่ยวนำ 3
เฟส ส่วนมากพันขดลวดเป็นแบบพิตช์เศษส่วน ซึ่งมีข้อดีดังนี้ 1)
เพื่อลดค่าลีคเกจรีแอกแตนซ์
ทำให้มอเตอร์มีค่าเพาเวอร์แฟกเตอร์สูงขึ้น 2)
การพันขดลวดมีความแข็งแรงขึ้น เนื่องจากความกว้างของขดลวดแคบลง 3) ประหยัดขดลวดทองแดงที่ใช้พันมอเตอร์
4)
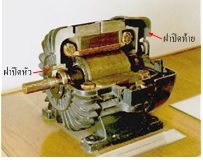
ลดกำลังไฟฟ้าสูญเสียในขดลวดทองแดง (Copper Losses) - ฝาปิดหัวท้าย
(End
Plate) ทำจากเหล็กหล่อเหนียวหรือเหล็กเหนียว ฝาปิดนี้จะถูกยึดติดอยู่กับโครงมอเตอร์ด้วยสลักเกลียว
มีแบริ่งอยู่ตรงกลางสำหรับรองรับเพลาเพื่อให้โรเตอร์ หมุนอยู่ในแนวศูนย์กลางพอดี
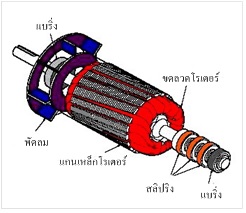
รูปฝาปิดหัวท้าย ส่วนที่เคลื่อนที่มีอยู่ 2 แบบ ได้แก่ โรเตอร์แบบกรงกระรอกและโรเตอร์แบบพันขดลวด ซึ่งโรเตอร์ทั้งสองแบบนี้ ประกอบด้วยส่วนที่สำคัญ คือ แกนเหล็กโรเตอร์ขดลวดทองแดง ใบพัด และเพลา 1.โรเตอร์กรงกระรอก
(Squirrel cage Rotor)
ประกอบด้วยแกนเหล็กที่ทำมาจากแผ่นเหล็กบางๆ มีลักษณะกลมอัดซ้อนกันโดยมีเพลาร้อยทะลุ เพื่อยึดให้แน่นที่ผิวของโรเตอร์นี้จะมีสลอตไปตามทางยาวและในสลอตจะมีแท่งตัวนำทองแดงหรืออะลูมิเนียมฝังอยู่โดยรอบที่ส่วนปลายของแท่งตัวนำจะเชื่อมติดกับวงแหวนโลหะ ซึ่งจะมีลักษณะคล้ายกรงกระรอก
ดังนั้นจึงมีชื่อเรียกว่า โรเตอร์แบบกรงกระรอก
ในปัจจุบันตัวนำที่ฝังอยู่ในสลอตของโรเตอร์จะใช้วิธีหล่อตัวนำที่เป็นโลหะผสมหรืออะลูมิเนียมเข้าไปเลย รวมทั้งหล่อวงแหวนตัวนำที่มีครีบช่วยระบายความร้อนเชื่อมเข้ากับปลายตัวนำแต่ละด้านของโรเตอร์ด้วย 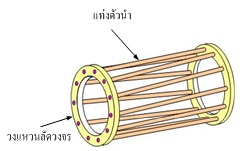  รูปโรเตอร์แบบกรงกระรอก 2.โรเตอร์พันขดลวด (Wound Rotor) เป็นโรเตอร์ที่มีส่วนประกอบคล้ายกับโรเตอร์กรงกระรอก แตกต่างกันตรงที่ตัวนำที่ใช้จะพันด้วยขดลวดทองแดงเคลือบด้วยฉนวนไฟฟ้าอย่างดี จำนวน 3 ชุด หรือ 3 เฟส พันอยู่ในสลอต แต่ละเฟสจะวางทำมุมห่างกัน 120 องศาไฟฟ้า และต้องพันขดลวดให้มีจำนวนขั้วแม่เหล็กเท่ากับจำนวนขั้วแม่เหล็กที่สเตเตอร์ด้วย ขดลวดทั้ง 3 ชุดจะต่อกันแบบสตาร์ (Star) และปลายอีกด้านหนึ่งต่อเข้ากับสลิปริง (Slip ring) 3 วงที่ติดอยู่บนเพลาด้านหนึ่ง ซึ่งจะมีแปรงถ่านสัมผัสอยู่เพื่อต่อไปยังอุปกรณ์ควบคุมภายนอก(ตัวต้านทานปรับค่าได้)
ดังนั้นมอเตอร์เหนี่ยวนำ
3
เฟส ที่มีโรเตอร์แบบนี้จึงนิยมเรียกว่า สลิปริงมอเตอร์(Slip
ring Motor)
และการควบคุมความเร็วของมอเตอร์ทำได้โดยการเพิ่มหรือลดค่าความต้านทานภายนอกที่ต่อผ่านทางสลิปริง
มอเตอร์เหนี่ยวนำ 3 เฟสที่มีโรเตอร์แบบพันขดลวดจะให้แรงบิดเริ่มเดินสูง
เมื่อมอเตอร์หมุนเข้าสู่ความเร็วปกติ สลิปริงจะถูกลัดวงจร
ทำให้โรเตอร์ทำงานแบบกรงกระรอก
รูปโรเตอร์แบบพันขดลวด - มอเตอร์เหนี่ยวนำที่มีโรเตอร์แบบกรงกระรอก (Squirrel
Cage Induction Motor) ตัวโรเตอร์จะมีโครงสร้างแบบกรงกระรอก
เหมือนกับโรเตอร์ของสปลิทเฟสมอเตอร์ สำหรับตัว สเตเตอร์เป็นโครงสร้างเหล็กหล่ออยู่ภายนอก
และภายในเป็นเหล็กแผ่นบาง ๆ อัดซ้อนกันมีร่องและมีการพันขดลวดสเตเตอร์เพื่อสร้างสนามแม่เหล็กหมุน
จำนวน
3 ขด ตามจำนวนของลำดับเฟสของแหล่งจ่ายไฟฟ้ากระแสสลับ
มอเตอร์เหนี่ยวนำที่มีโรเตอร์แบบกรงกระรอก - การทำงานของมอเตอร์เหนี่ยวนำ 3 เฟส โรเตอร์แบบกรงกระรอก เมื่อป้อนกระแสไฟฟ้ากระแสสลับ 3 เฟสให้กับขดลวดสเตเตอร์จะเกิดสนามแม่เหล็กหมุนขึ้นที่สเตเตอร์ด้วยความเร็วซิงโครนัส
(Ns) สนามแม่เหล็กหมุนนี้จะเคลื่อนที่ตัดขดลวดที่โรเตอร์ทำให้เกิดแรงเคลื่อนไฟฟ้าเหนี่ยวนำขึ้นที่ตัวนำบนโรเตอร์ แต่ตัวนำบนโรเตอร์นี้ได้ถูกลัดวงจรไว้ ทำให้มีกระแสไฟฟ้าไหลที่ตัวนำนี้ ทำให้เกิดสนามแม่เหล็กที่โรเตอร์เกิดขั้วเหนือและขั้วใต้ขึ้น
ในโรเตอร์เช่นเดียวกับที่เกิดขึ้นที่สเตเตอร์ผลรวมของเส้นแรงแม่เหล็กที่สเตเตอร์กับเส้นแรงแม่เหล็กรอบตัวนำที่โรเตอร์ทำให้เกิดแรงบิดขึ้นที่โรเตอร์
และทำให้โรเตอร์หมุนไปได้และมีทิศทางตามทิศทางของสนามแม่เหล็กหมุนที่สเตเตอร์
รูปการเกิดแรงบิดที่ตัวนำของโรเตอร์ - มอเตอร์เหนี่ยวนำที่มีโรเตอร์แบบขดลวด (Wound Rotor
Induction Motor) ตัวโรเตอร์จะทำจากเหล็กแผ่นบาง
ๆอัดซ้อนกัน เป็นตัวทุ่นคล้ายอาร์เมเจอร์ของมอเตอร์ไฟฟ้า กระแสตรง มีร่องสำหรับวางขดลวดของตัวโรเตอร์เป็นขดลวด 3 ชุด สำหรับสร้างขั้วแม่เหล็ก 3 เฟส เช่นกัน ปลายของขดลวดทั้ง
3 ชุดต่อกับสลิปริง (Slip Ring) จำนวน
3 อัน สำหรับเป็นทางให้ กระแสไฟฟ้าครบวงจรทั้ง 3 เฟส ส่วนประกอบอื่น ๆ ของมอเตอร์ชนิดนี้เหมือนกันกับชนิดที่มีโรเตอร์ แบบกรงกระรอก
รูปมอเตอร์เหนี่ยวนำที่มีโรเตอร์แบบขดลวด - การทำงานของมอเตอร์เหนี่ยวนำ 3 เฟส โรเตอร์แบบพันขดลวดอาศัยหลักการเกิดสนามแม่เหล็กหมุนที่สเตเตอร์และทำให้โรเตอร์หมุนไปได้นั้นจะเหมือนกับมอเตอร์เหนี่ยวนำ 3 เฟส แบบโรเตอร์กรงกระรอกจะแตกต่างกันเฉพาะตอนเริ่มเดินมอเตอร์เท่านั้น
รูปการเริ่มเดินมอเตอร์เหนี่ยวนำ 3 เฟสแบบโรเตอร์พันขดลวด จากรูปขณะเริ่มเดินมอเตอร์ต้องปรับความต้านทานภายนอกไว้ที่ตำแหน่งมีค่าความต้านทานสูงสุด
จะทำให้ได้ค่าแรงบิดเริ่มเดินมีค่าสูงสุด กระแสเริ่มเดินจะลดลงและเมื่อความเร็วของมอเตอร์เพิ่มขึ้นแล้วค่อยๆ
ลดความต้านทานภายนอกลง ขณะเดียวกันมอเตอร์จะมีอัตราการหมุนเร็วขึ้น
และเมื่อลดความต้านทานภายนอกลงจนหมดสลิปริงจะถูกลัดวงจร
ขณะนี้มอเตอร์จะมีความเร็วสูงสุด ประสิทธิภาพของมอเตอร์ขึ้นอยู่กับค่าของการสูญเสียที่เกิดขึ้นในตัวมอเตอร์ โดยทั่วไปการสูญเสียในมอเตอร์เกิดจากการสูญเสียทางไฟฟ้า (Electrical loss) การสูญเสียจากภาระการใช้งาน (Stray loss) ซึ่งแบ่งเป็นการสูญเสียที่มีค่าคงที่และการสูญเสียที่เปลี่ยนแปลงตามภาระของมอเตอร์ ค่าประสิทธิภาพของมอเตอร์หาได้ดังนี้ ประสิทธิภาพ (%) = (กำลังเอาต์พุต/กำลังอินพุต) × 100 เพื่อให้ได้ประสิทธิภาพสูงสุดควรจัดการให้มอเตอร์ขับภาระที่ประมาณ 80-100% ของภาระเต็มที่ (Fullload) หรือค่าแรงม้า (Horse power) ที่บอกไว้ในป้ายชื่อ (Name plate) เป็นค่าของกำลังเอาต์พุต ส่วนค่ากำลังที่นำมาใช้จริง คือ ค่ากำลัง อินพุต ปริมาณของพลังงานอินพุตที่ใช้ผลิตแรงม้าตามพิกัด นั้น จะแตกต่างกัน ไปสำหรับมอเตอร์แต่ละตัว มอเตอร์ที่มีประสิทธิภาพมากกว่าจะต้องการกำลังอินพุตน้อยเมื่อเปรียบเทียบกับมอเตอร์ที่มีประสิทธิภาพน้อยกว่าที่ให้เอาต์พุตเท่ากัน ข้อควรระวังคือ ไม่ควรให้มอเตอร์รับภาระเกินกำลัง (Over load) เพราะจะทำให้ประสิทธิภาพต่ำลงและความร้อนจะเพิ่มสูงขึ้น |

หน้าหลักสินค้า เกี่ยวกับเรา บทความวิศวกรรมผลงานที่ผ่านมา
+VSD ,SOFTSTART+GROUND SYSTEMS+SOLAR FARM POWER PLANT+INSTRUMENT+PLC SYSYEMS+Gas Engine+OFFSHORE+Project Hongsa Power+Project Tri-Generator Gas Engine+Project RWC 22 kV+Project Co-Generator Gas EngineTurntable ModelESP Project+SOLAR FARM POWER PLANT+INSTRUMENT+Gas Engine
มอเตอร์ WEG ในประเทศไทย พันธมิตรธุรกิจ Webboardถาม-ตอบ (FAQ)FAQ-Electrical Power InstallationFAQ-DC MotorFAQ-AC Induction MotorFAQ-Motor Protection RelayFAQ-Soft StartersFAQ- Energy conservation
ติดต่อสอบถาม/แผนที่ Staff login ร่วมงานกับเราข่าวสาร GINO







 line ID :
line ID :